
A magnetometer with a sensitivity of the order of 1.5 nT, which enables the dimensions and direction of the Earth’s magnetic field induction vector, or the magnetic field produced by iron-containing objects to be determined, is described. Similar devices can be used in mobile and on-board apparatus for searching for magnetic anomalies behind opaque barriers, for Earth’s magnetic field navigation, seismic sensors, etc.
Similar content being viewed by others
Instruments for measuring magnetic fields with values of the order of the Earth’s magnetic field have been used for more than 50 years. The main characteristics of modern magnetometers are their sensitivity to a magnetic field and their size. As a rule, magnetometers with a sensitivity of less than 1 nT have mass/size and operating characteristics which do not enable them to be used in mobile and transportable devices. At present magnetometers with the minimum possible dimensions are based on the magnetoresistive and galvanomagnetic effects, and their sensitivity may reach tenths of a microtesla. It is possible to increase the sensitivity of magnetometers further, while preserving their compactness, using resonators made of yttrium iron garnet as the magnetically sensitive elements.
In a number of papers, for example, in [1], the results of an information search and an analysis of modern vector magnetometers are presented. A vector magnetometer is known containing three similar fluxgate sensors and their control and signal processing circuits [2]. The true direction of the measured magnetic field vector is determined when the signals from all three fluxgate sensors are equal, in the case when each of them occupies the same angular position with respect to the total magnetic induction vector of the magnetic field being measured, corresponding to the optimum sensitivity of the fluxgate sensors. It is proposed to change the position of the magnetometer in order to search for the direction of the magnetic field vector. Among the drawbacks of this instrument is the considerable complexity of the measuring circuit and the need to use identical magnetic field sensors, which is difficult to achieve in practice.
There is a magnetometer, based on an induction sensor, used to determine the direction of the magnetic field induction vector when searching for iron deposits [3]. After the first measurement and determination of the direction to the object, one must move the magnetometer once more and obtain the new direction to the object and then the point where the first and second directions intersect, indicating the position of the object.
The common drawbacks of these magnetometers is the need to rotate them when determining the direction of the magnetic field or the direction to an iron-containing object, and the inaccuracy when determining the azimuthal angle to an object, due to averaging of the value of the magnetic field induction being investigated, since the response signal of the induction and fluxgate sensors is proportional to the induction vector flux through the transverse section of the inductance coil. Such sensors do not enable one to determine the position of the object reliably, when there are local perturbations of the magnetic field and magnetic interference, and they also cannot be used for extended objects, several objects, when searching for moving objects, etc.
In this paper we describe a magnetometer sensor based on the construction of a magnetically controlled generator, the output frequency of which is controlled by the external constant magnetic field [4–7]. There is a magnetically sensitive element – a spherical YIG resonator, in the feedback line of the generator.
The prototype of this sensor is a single-component sensor based on a YIG resonator [1], which contains the following: a magnetically controlled generator based on a field-effect or bipolar transistor with an active element and feedback line, a spherical or film YIG resonator as the frequency-setting element, placed in the generator feedback line, a frequency meter, the input of which is connected to the generator output, and a matching unit for transmitting the results of the measurements from the frequency meter to the processing unit, where the corresponding components of the magnetic field are calculated. To transfer the YIG resonator into the single-domain mode, a magnetic system in the form of a permanent magnet, which produces, in the region of the resonator, a field, sufficient to transfer it into the saturated state, is usually employed. The generator operates at the ferromagnetic resonance frequency, which depends on the magnetization of the resonator, which is also affected by the field of the magnetic system and the external induction, due to the constant component of the Earth’s magnetic field or a ferromagnetic object. However, one sensor enables one to determine only one component of the magnetic field vector. To find the total vector, the sensor must be rotated or three identical sensors must be used simultaneously.
The problem we investigated was to develop a compact three-component (vector) magnetometer based on a single magnetic-field sensor to determine the magnitude and direction of the Earth’s total magnetic field induction vector or the magnetic field produced by a ferromagnetic object.
Theoretical and practical investigations on the formation of domain structures in samples of YIG and the control of their properties are given in [9–13]. The results can be used to design a vector magnetometer. The main component part of the magnetometer is the magnetically controlled generator, the frequency of which is determined by the frequency of the YIG resonator, and its induction is controlled by the external (measured) magnetic field. When constructing the magnetometer, we used the magnetic properties of the YIG crystals, which consists of the existence in them of three defined directions – the axes of easy magnetization. The possibility of using a single magnetically sensitive element – a spherical YIG resonator, is illustrated in Fig. 1. When the magnetic field is alternately directed in the direction of easy magnetization, the direction of the resonator magnetization vector is established along the corresponding axis (OA, OB, or OC), which leads to a change in the frequency of the magnetically controlled generator, due to the differences in the mutual orientation of the magnetization vectors of the resonator and of the external magnetic field.

Spherical YIG resonator.
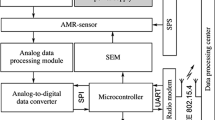
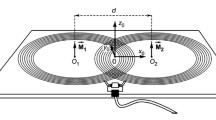
The compact magnetic system is placed close to the spherical resonator and consists of three inductance coils 1, 2 and 3 (Fig. 2), which enables the orientation of the magnetization vector in resonator 4 to be changed periodically by 120° (in the projection on to the horizontal plane). The components B 1, B 2, and B 3 of the magnetic induction vector and the total magnetic induction vector B 0 of the external constant magnetic field are shown in Fig. 3.

Block diagram of the magnetometer: 1, 2, 3) inductance coils; 4) spherical YIG resonator; 5) magnetic-field controlled generator; 6) demultiplexor; 7) pulse counter; 8) frequency meter; 9) invertor; 10) matching circuit; 11) processing unit; 12) pulse generator.

Components and total magnetic induction vector of the measured magnetic field.
Consider the magnetometer system shown in Fig. 2. The resonator 4 is connected to the feedback circuit of generator 5, controlled by the magnetic field. The inductance coils 1, 2, and 3, to which current pulses from a rectangular pulse generator 12 are applied alternately, are close to it. The corresponding coaxial – coaxial and microstrip line – coaxial connectors are not shown in Fig. 2; they are calculated using the model presented in [14]. The three inductance coils are connected alternately using a logic magnetic system control unit based on simple logic circuits. A train of rectangular pulses from the pulse generator 12 is fed to the double two-digit summing counter 7. Controlling address binary codes (10, 01, 11), corresponding to the three inductance coils, are successively generated at its output. After each third pulse, a signal from inductance coil 3 is applied to the counter, which returns it to the initial state. The address outputs of counter 7 are connected to the two inputs of demultiplexor 6, in which the signals from the inputs are distributed in the desired sequence to the three outputs. The choice of the required output busbar ensures that the corresponding code is applied to the address inputs (10, 01, or 11). Current pulses are connected alternately to the inductance coils, which produce a magnetic field in a defined direction and alternately specify the direction of the resonator magnetization vector along the three axes OA, OB, and OC (see Fig. 1).
The input of the frequency meter 8, which measures the frequency of the magnetically controlled generator when trigger pulses from the output of inverter 9 are applied, is connected to the output of the magnetically controlled generator 5 (see Fig. 2). The measured values of the frequency are applied to the processing unit 11 via a matching circuit 10, which performs the function of an interface. The value and direction of the total magnetic induction vector (see Fig. 3) of the external constant magnetic field (B 0 = B 1 + B 2 + B 3), where B 1, B 2, and B 3 are the components of the magnetic field obtained when the corresponding inductance coils are connected, are calculated by a program in the processing unit.
The magnetometer operates as follows (see Fig. 2). The rectangular pulse generator 12 sends current pulses of frequency ν to the inductance coils 1, 2, and 3. The logic control unit of the magnetic system 6, 7 successively connects the current pulses to the three inductance coils. For a pulse length of the order of 1 msec and an inductance of 1 mH, the transients are small and do not require additional correction. For a diameter of the spherical resonator of about 0.5 mm, and a diameter and length of the inductance coils of 0.75 mm and 1.5 mm, respectively, a fairly uniform magnetic field of about 200 × 10−4 T is produced in the region of the spherical resonator 4. Hence, the inductance coils 1, 2, and 3 alternately produce magnetic fields in the region of the spherical resonator, directed along the three axes of easy magnetization. The magnetization vector of the spherical resonator then changes direction; in the projection on to the horizontal plane A′B′C′ (see Fig. 1) the corresponding angles are 120°.
The resulting magnetic field in the region of the spherical resonator is determined by the sum of the magnetic induction vectors of the external (measured) field B 0 and the field B i from one of the inductance coils 1, 2, or 3 (see Fig. 2):
Information on the magnetic induction is contained in the frequency of the magnetically controlled generator 5, which is specified by the ferromagnetic resonance frequency in the spherical resonator and is measured with frequency meter 8. The magnetic induction is related to the measured frequency by the simple relation: ƒ = γ|B|, where γ is the gyromagnetic ratio. The pulses that trigger the frequency meter from the inverter 9 are synchronized with the frequency ν at which the direction of the magnetic field is switched. The total magnetic induction vector B 0 is obtained by vector addition of the components B 1, B 2, and B 3.
This magnetometer system has a number of advantages compared with existing ones. To determine the position of an object, a direction finding method is usually employed in which several identical sensors determine the azimuthal angles in the direction of the object [1], or a single sensor is employed, which must be shifted with a repeated determination of the direction to the iron-containing object. Consequently, in the traditional approaches to solving problems of detecting the position of object, it is necessary either to have identical sensors, or one sensor, which must be moved.
The proposed solution combines both approaches. The magnetic properties of the spherical resonator enables the angle of the magnetization vector to be changed and provides the possibility for spatial range finding. The use of the same magnetically controlled generator solves the problem of requiring identical sensors.
The theoretical value of the slope of the tuning frequency of the basic magnetically controlled generator [4–7] as a function of the magnetic field induction is determined by the gyromagnetic ratio and is 28 Hz/nT. The absolute sensitivity of the basic magnetically controlled generator, based on GaAs technology, for a measured magnetic field induction of 50 mT, was estimated to be 1.5 nT [8]. The sensitivity to the Earth’s magnetic field in three perpendicular planes, achieved for magnetometer models, is somewhat less than the theoretical values and lies in the range 21.0–21.8 Hz/nT [8]. The problems involved in adjusting the spherical resonator [15], calibrating the magnetometer and estimating the error in measuring the magnetic field induction require separate investigations and are not considered here. Preliminary theoretical estimates of the absolute sensitivity of the magnetometer give a few nanotesla.
The proposed construction of the vector magnetometer has high sensitivity with a fairly simple method of determining the direction of the magnetic field. The magnetometer can be used to solve problems of navigation based on the Earth’s magnetic field, and for detecting and diagnosing iron-containing objects.
References
S. P. Kudryavtseva et al., “An analysis of patent information on the characteristics of magnetometer sensors of magnetoresistive and semiconductor materials, regenerator-type sensors, microresonator sensors and magnetometers based on them,” Geteromagn. Mikroelektr., No. 2, 177–193 (2005).
S. K. Prishchepov and K. R. Valitov, Patent RU 2218577, “A method of determining the total magnetic field vector and a device for achieving it,” Izobret. Polezn. Modeli, No. 38 (2003).
T. S. Emel’yanenko et al., Patent RU 214880, “A magnetometer,” Izobret. Polezn. Modeli, No. 17 (2000).
A. L. Khvalin et al., “Experimental investigations of a hybrid integrated magnetically controlled generator,” Prib. Sist. Upravl., Kontrol, Diagnost., No. 11, 42–44 (2009).
A. L. Khvalin, L. S. Sotov, and A. V. Vasil’ev, “Calculation of the characteristics of an integrated magnetically controlled generator in the 26.0–37.5 GHz frequency range,” Prib. Sist. Upravl., Kontrol, Diagnost., No. 11, 47–49 (2010).
A. L. Khvalin et al., “A primary converter based on a YIG generator for measuring intense magnetic fields,” Datch. Sistemy, No. 10, 57–58 (2009).
L. S. Sotov and A. L. Khvalin, Patent RU 2472182, “A device for detecting electrically conducting objects based on magnetic-field sensors with a frequency output,” Izobret. Polezn. Modeli, No. 1 (2013).
A. L. Khvalin and L. S. Sotov, Patent RU 2393594, “A microwave ferrite passband filter,” Izobret. Polezn. Modeli, No. 18 (2010).
M. L. Kovalenko and L. S. Sotov, “Investigation of a two-domain model of a spherical microresonator based on yttrium – iron garnet in the unsaturated state,” Geteromagn. Mikroelektr., No. 2, 30–53 (2005).
A. L. Khvalin, “A surface magnetic permeability method in solving the problem of analyzing laminar ferrite-containing structures,” Vestn. Tikhookean. Gos. Univ., No. 4, 25–30 (2009).
A. L. Khvalin, “Dispersion relations for laminar ferrite-containing structures in a rectangular waveguide,” Vestn. Tikhookean. Gos. Univ., No. 1, 73–80 (2010).
A. L. Khvalin, “Modeling of the magnetic microstructure of band domains in YIG films,” Geteromagn. Mikroelektr., No. 11, 4–14 (2011).
A. L. Khvalin, A. A. Solopov, and A. V. Lyashenko, “Investigation of microwave resonators based on epitaxial YIG structures taking the domain structure into account,” Geteromagn. Mikroelektr., No. 12, 4–11 (2012).
B. M. Kats, V. P. Meschanov, and A. L. Khvalin, “Synthesis of superwide-band matching adaptors in round coaxial lines,” IEEE Trans. Microwave Theory and Tech., 49, No. 3, 575–579 (2001).
A. L. Khvalin, Patent RU 2396644, “A microwave filter with the possibility of adjusting the ferrite resonator,” Izobret. Polezn. Modeli, No. 22 (2010).
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated from Izmeritel’naya Tekhnika, No. 10, pp. 45–48, October, 2014. Original article submitted July 16, 2014.
Rights and permissions
About this article

Cite this article
Khvalin, A.L. A Vector Magnetometer for Measuring Weak Fields. Meas Tech 57, 1184–1188 (2015). https://doi.org/10.1007/s11018-015-0600-y
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11018-015-0600-y